RPS的定义
RPS(Referenzpunktsystem)指基准点系统(根VW01055的规定),其根本目的是为了避免基准变换而造成不可预知的后果。
对于测量室来说,RPS系统就是用来建立坐标系。
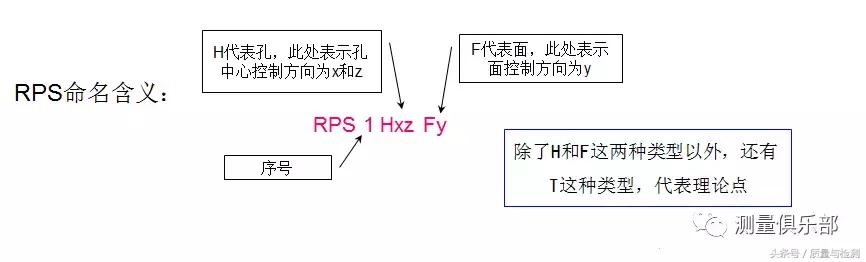
需要说明的是,不平行于整车坐标系的零件坐标系控制方向采用 a,b,c 来命名,仅起辅助控制功能的RPS点,其命名采用小写字母 h,f ,例如:RPS 7 fy .

RPS的公差设置
通常来说,零件都由主控RPS和辅控RPS组成。
主控: RPs1 H XZ Fy 主控输出方向公差为+/-0.05mm
辅控: RPS 7 fy 辅控输出方向公差为+/-0.02mm
说明:产品图纸中主控输出方向公差为0,实际情况无法实现。 根据SVW测量机精度设为+/-0.05mm,辅控输出方向和非控制方向输出公差和图纸保持一致。
坐标系基础知识

整车坐标系:坐标系零点即两前轮中心连线与Y=0平面刺穿点。+X轴指向车身后方,+Y轴指向车身右方,+Z轴指向车身上方
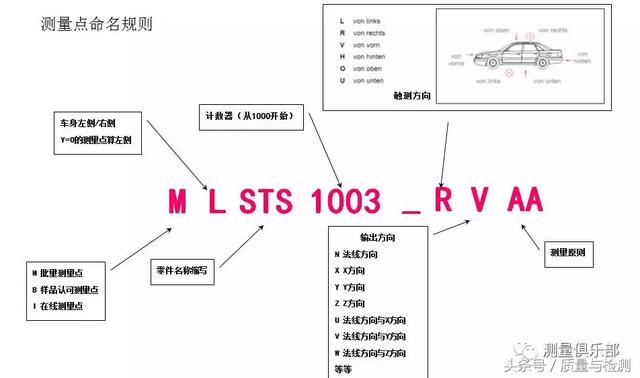
PMP的定义
PMP包含的内容
PMP数据
一般数据
特征点类型 / 修改历史
标识 / 名称
相关零件号 / 车身区域 / 总成
车身对称性 / 说明资料
几何状态数据
CAD数据 / 数模 / 线性型面
理论坐标 / 理论尺寸
法线方向(矢量)
X, Y, Z或D方向的公差
触测方向
测量技术相关数据
测量原则,调整法则
参考系统 / 功能尺寸点
评价规定
2D-PMP结构
(1)目录
(2)版本更改说明列表
(3)零件名列表
(4)RPS一览表
(5)RPS测量点的详细描述
(6)测量点一览表
(7)测量点的详细描述
PMP制作工艺链

数据盒说明

A: 此处表示测量方向的符号,和命名中第11位相对应
B:PMP点命名
D:公差值
E:评价要素 P代表法向/D代表直径(非圆孔则代表长或宽)//X //Y//Z,如果哪个位置空着的话用“_ ”代替
G:可以填A-Z中的任何一个字母,用以表示一个局部3D基准坐标系(右旋法则)
I1:命名
I2:此处表示该测点与其他测点之间的关系,只可以输入F,Z,E,S,li+re这些符号,其他输入不允许
F—代表此测点是功能尺寸所涉及的一个点
Z—此测点不仅在总成也在单件或者在分总成上测量
E—此测点为该零件独有,别处用不到
S—此零件上的测点和相邻零件上的测点在同一个截面上。例如评价两个零件缝隙时
所需的测点,以及旋转面
Li+re—测点关于XZ平面对称,对应命名中的第2位
注1:当一个测点和其他测点存在联系的时候,修改此测点时,就可以通过I2了解到
此时会影响到其他哪些测点。
注2:哪处字母空出时用“_”代替,例如_ZS,li+re _ES,_ FZ_,li+re
注3:E和Z不可能同时出现,F和Z几乎一直在一起出现
I3:对该PMP点的解释(BESCHREIBUNG)
如果在测点命名里体现不出某测量原则的时候,也可以在I3中对此测量原则进行说明。
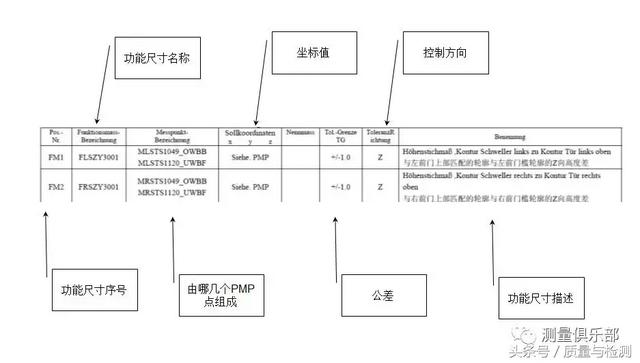
FM的定义
FM (Funktionsmass) ,用来判断车身零件功能质量状态的尺寸。
FM的结构
(1)目录
(2)版本更改说明列表
(3)分发
(4)形状和位置公差要求
(5)功能尺寸的数量
(6)功能尺寸的图形表示
(7)功能尺寸列表
FM-Katalog